sometimes arnold will freeze on you in houdini...
In Linux, open up a new terminal and type -
and maybe, just maybe you'll be able to get Houdini to respond again.
killall hick-bin will also work
pkill hick
sometimes arnold will freeze on you in houdini...
In Linux, open up a new terminal and type -
and maybe, just maybe you'll be able to get Houdini to respond again.
killall hick-bin will also work
pkill hick
stolen from a Toadstorm reply somewhere...
axis might be more finessed than just setting to z as shown.. Same goes for the angle, which I've brute forced to -90 times. Anyway, this will give a bit of spin to your packed rigid bodies
vector axis = set(0,0,1); // the random axis attribute you created
float angle = -90*fit01(rand(@ptnum), -1, 1); // change this to whatever range, in radians
vector4 q = quaternion(angle, axis);
v@w = qconvert(q);

Now you might want to store the frame that the curve receives the red attribute and use that information later - eg. do an attribute fade, so the attrib only starts fading when we reach the stored frame.
What you want to do is plug things into a solver, as above (just one input) and then....

vector newCd=point(1,"Cd",@ptnum);
if(@Cd!=newCd){
if(@change_frame==0){
@change_frame=@Frame;
//i@changed += 1; //debugging
}
}
What does this mean? Well, the Prev Frame is typically on the first input of point wrangles when in a solver... you are generally "adding" onto whatever was in the previous frame. (I always think about it the other way, but there you go). So we check to see what the "new" (or current frame) Cd value is.. And compare it to the existing (previous frame) value. If it is not the same, that means a change has occurred.
Now we check to see if the @change_frame value has been altered from zero or not. If it hasn't and is still zero, then we now make it equal to the current frame value.
i always have to look this up on cgwiki...
the left stream is some sweat drops falling down a surface.. the right stream is the surface.
It goes into a solver



Not entirely sure how this deals with objects that move around A LOT, but for something mostly static that isn't near the origin it's good. Useful for simming stuff at zero then shoving back to where it came from.
In a point wrangle, move object to 0.0.0..
// Get center of the oject bounding box (centroid)
vector min = {0, 0, 0};
vector max = {0, 0, 0};
getpointbbox(0, min, max);
vector centroid = (max + min)/2.0;
// Build and apply transformation matrix
vector translate = centroid + {0,-0.2,0};
vector rotate = {0,0,0};
vector scale = {1,1,1};
matrix xform = invert(maketransform(0, 0, translate, rotate, scale));
@P *= xform;
// Store transformation matrix in attribute
4@xform_matrix = xform;
Then in a later point wrangle, to revert back to original position
@P *= invert(4@xform_matrix);
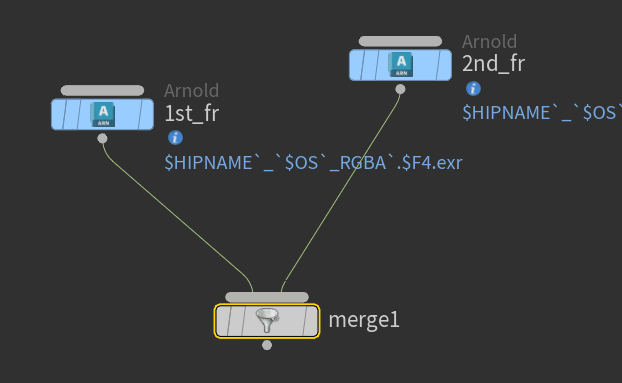
it seems like chaining rops breaks a bit - the frame ranges don't seem to get respected.
It's better to use a merge rop & specify strict frame range

some mark fancher youtube vex tidbits-
//in a rig attrib wrangle, to rotate joints - take into account parenting!-
vector axis={1,0,0};
prerotate(4@localtransform, chf("angle"),axis);
-----------------------------------------------------------------------------------------
//in a rig attrib wrangle,to scale joints - take into account parenting-
prescale(4@localtransform, chf("scale"));
--------------------------------------------------------------------------------------------------------
//point wrangle, after a distance along geometry - nice rampable normalised mask
float map=f@map;
float p=chf("position");
float t=chf("transition");
t=max(t,0.0001); //clamps down value
p=fit01(p,-t,1); //makes mask zero when t at low values and p at zero
float mask=fit(map,p,p+t,1,0);
mask=chramp("ramp",mask);
f@mask=mask;
--------------------------------------------------------------------------------------------
how to store activation frame based on a threshold of something
in a point wrangle
if(@value>chf("threshold")){
i@group_active=1;
}
inside a solver...connect prev_frame to input 2 and input 1 to 1 of a point wrangle..
int prev_active=inpointgroup(1,"active",@ptnum); //check if previous frame was active
//if group active and NOT previously active then give active_frame value of current frame
if(i@group_active==1 && prev_active==0){
f@active_frame=@Frame;
}
float activationFramePrevious=point(1,"active_frame",@ptnum);
f@active_frame=max(activationFramePrevious, @active_frame);
simple spring solver - prev frame into input 1, input 1 into 2nd input of wrangle
based on F=-kx -bv
where F is force, k is the spring coefficient (stiffness), x is the distance, b is the damping and v is velocity. We also use F=ma to calculate acceleration (and use that for velocity, which ultimately gets added to Position)
float m=chf("mass");
float k=chf("stiffness");//stiffness coefficient
float b=chf("damping");//damping coefficient
vector p2=point(1,"P",@ptnum);//position of point on "current" frame
vector x=@P-p2; //distance between previous and current
vector f=-k*x -b*v@_v;//calculate force using damped harmonic motion equation
vector a =f/m; //get acceleration from f=ma to then find...
v@_v+=a;//velocity
v@P+=v@_v;//new position is calculated by adding velocity vector to current pos
I think Toadstorm posted this somewhere on odforce... but it's a useful little vex snippet
vector fwd = v@N;
vector up = {0,1,0};an equivalent to maya's "unlock normals" in houdini.. usually needed after a polyextrude -
reverse sop node, followed by a normal node
general character rig workflow -
exoside quad remesh
labs 3d straight skeleton, fuse, delete half (for mirroring), resample.
use cgwiki matt estela's edge transport distance attrib propogate trick to reorder vert numbers
(edge transport "(distance)", promote to primitive (don't delete origintal), sort by distance, polypath)
rig doctor
mirror rig
joint capture biharmonic for mesh capture. joint capture paint to tweak any specific weights
stash captured geo and skele, externally(!)
plug all into joint deform.
rig wrangle to use curl noise vector attrib to mess with joint rotation/scale/pos.
he sets poses with multiple rig pose nodes. Then switch-nodes between them using a $F and modulo expression. This is nice for stepped anim style, but if you want to inbetween them,
Use a "smooth motion" node. It's used for fixing jittery mocap - but it also provides a nice tween between the different rig poses.
Another novel blending approach is to put the step anim through a solver. Inside the solver use a skeleton blend with the previous frame, using a blend value of less-than-one, for an interesting ramped blend between poses.
This can also be used with stepped blend shapes(eg for a stepped mountain sop anim). Smooth motion seems to have some nice secondary motion built in.
There is a secondary motion sop node which lets you specify a driver joint & the group to affect. Typically these will be joints down the hierarchy, eg in a tail/whip/arm. Also has some effect features - lag/overshoot, jiggle and gravity.
.usd files are written as binary by default. to write a .usd file as ascii, add
":SDF_FORMAT_ARGS:format=usda" (without quotes) directly after the file name.
eg.
$HIP/usd/$HIPNAME/scenes/extensions/extension_scene_ascii.usd:SDF_FORMAT_ARGS:format=usda
vlength(vtorigin(".","../FOCUS_MAN"))
paste this into the Focus Distance parameter, replacing FOCUS_MAN with whichever object/null you're following.
s@frameNum= sprintf('%04d',clamp((@Frame-1000),0,68));
//s@name = sprintf('%04d',@Frame);
s@textureFile=chs("part1")+@frameNum+chs("end");
slight update on zero padding in vex...
use sprintf to reformat numbers..
string camera=chs("../camera");
vector campos=toNDC(camera,@P);
vector2 padding =chu("../padding");
if((campos.x+padding.x)<0||(campos.x-padding.x)>1||(campos.y+padding.y)||(campos.y-padding.y)){
i@group_kill=1;}
matrix cam=optransform(camera);
vector camera_position=cracktransform(0,0,0,{0,0,0}, cam);
float distance =distance (camera_position,@P);
float threshold=chf("../distance");
if(distance>threshold){
i@group_kill=1;}
use instancefile to access geo saved somewhere...
in a point wrangle -
s@instancefile=chs("path");
now with the geo node, you gotta add the instance tab and turn on fast instancing.


some of the newer tools in Houdini might do this, but it's quite nice to see how to do it manually.
point wrangle the curve, with heightfield in input 1..
float lift = chf('lift'); f@height = volumesample(1, 'height', v@P) + lift;
then plug that into a volume wrangle (input 1), heightfield in input 0
float width_min = chf('min_width'); float width_max = chf('max_width'); float ease = chf('roll_off'); int prim; vector uvw; float dist_crv = xyzdist(1, v@P, prim, uvw); float height_crv = primuv(1, 'height', prim, uvw); float mask = 1.0 - smooth(width_min, width_max, dist_crv, ease); f@height = lerp(f@height, height_crv, mask); f@mask = mask;
You can control the height with the "lift" slider made in the point wrangle, and the width/falloff in the sliders made in the volume wrangle.